Geometric Shape Modeling
Reconstruction
Implement a simplified version of the method in “Poisson Surface Reconstruction” by Kazhdan et al. 2006.
Registration
Implement a version of the iterative closest point (ICP).
Smoothing
Smooth a data signal defined over a curved surface.
This data could be a scalar field on the surface and smoothing corresponds to data denoising.

Or the data could be the vector field of the surface’s own geometry. This corresponds to geometric smoothing.

Subdivision
Produce a high-resolution, smooth surface from any coarse triangle mesh by upsampling and loop subdivision.
Decimation
Reduce faces and vertices through shortest edge collapse and quadric error minimization.

Deformation
Implement biharmonic deformation and as-rigid-as-possible deformation algorithms for interactive surface deformation.
Parameterization
Compute a 2D parameterization utilizing Tutte’s mapping as well as the “least squares conformal” energy.

Distances
Implement the heat geodesics algorithm.
Curvature
Compute discrete curvature quantities on a surface.
Normal-Driven Spherical Shape Analogies
Implement the paper “Normal-Driven Spherical Shape Analogies” (SGP 2021).

Introduction
Related Work
Before the publication of “Normal-Driven Spherical Shape Analogies”, the field lacked a comprehensive method for transferring geometric styles effectively. Previous approaches mainly targeted specific stylization styles for 3D objects, like collage art, manga style, or cubic style, but lacked a unified framework for achieving diverse results. Some techniques focused on transferring 3D geometric details, such as patch-based assembly and voxel-based texture synthesis, while others utilized surface normals in various geometry processing tasks like PolyCube deformation or mesh denoising.
However, there was a notable absence of methods that employed analogy-based approaches for stylization across different styles within a single framework. Additionally, existing techniques for surface normal-based deformations struggled to generalize to various stylization styles beyond specific cases like PolyCube deformation or cubic stylization. The paper addressed these limitations by introducing a novel approach that effectively leveraged analogy-based methods for diverse stylization styles and surface normal-based deformations.
Paper Contribution
The paper proposes a novel method for shape analogy, focusing on transferring geometric styles using surface normals. The approach formulates the problem as finding correspondences between a reference shape (a sphere) and a style shape, and subsequently transferring these correspondences to an input shape to generate an output shape with desired stylistic attributes.
Methodology
The paper employs a three-step process:
- Computing Correspondences: Correspondences between the style shape and a sphere are computed using either the Gauss map or curvature flow, depending on the complexity of the shape.
- Transferring Correspondences: Correspondences between the sphere and the input shape are computed, allowing for the transfer of surface normals from the style shape to the input shape.
- Normal-Driven Optimization: An optimization problem is formulated to deform the input shape based on target normals, ensuring that the output shape possesses desired stylistic attributes.
Impressive Results
The paper demonstrates the efficacy of the proposed method through various examples, showcasing the ability to generate diverse and stylized outputs from input shapes. The method allows for the transformation of shapes with intricate details, such as a cow, into styles represented by simpler geometric forms like cones or cubes. The approach’s flexibility in handling different shapes and styles, as well as its efficiency in computation, are among its most impressive results.
Implementation
The algorithm comprises three simple steps:
- Map the surface normal of the target style shape
to a unit sphere to compute target normals on this sphere ( ). - Construct analogous target normals (
) that relate to the normals of input shape ( ) in the same way that the mapped target normals ( ) relate to . - Utilizing inputs
and , generate the stylized shape whose normals approximate through optimization.
Generating
Depending on the provided style shape
Generating
Generating target normals
1 | void setTargetN(const Eigen::MatrixXd& styleN, const Eigen::MatrixXd& currentN, |
Generating
After obtaining a set of target normals
Here,
Normal-Driven Optimization with ARAP
We can use
We use
We adapt the observation that the space of unit vectors can be captured by rotations. Thus, we can perform a change of variables by replacing
where
We minimize this energy via the local/global strategy, where the local step involves solving a set of small Orthogonal Procrustes problems and the global step amounts to a linear solve.
Local Step with
Given a fixed
The above optimization is an instance of the Orthogonal Procrustes which finds the best rotation matrix
where
up to changing the sign of the column of
Global Step with
The global step updates the deformed vertex positions
fixed set of rotations
We can expand this energy as
It is often convenient to express the summation in terms of matrices.
We introduce a directed incidence matrix
where
Validation
Results
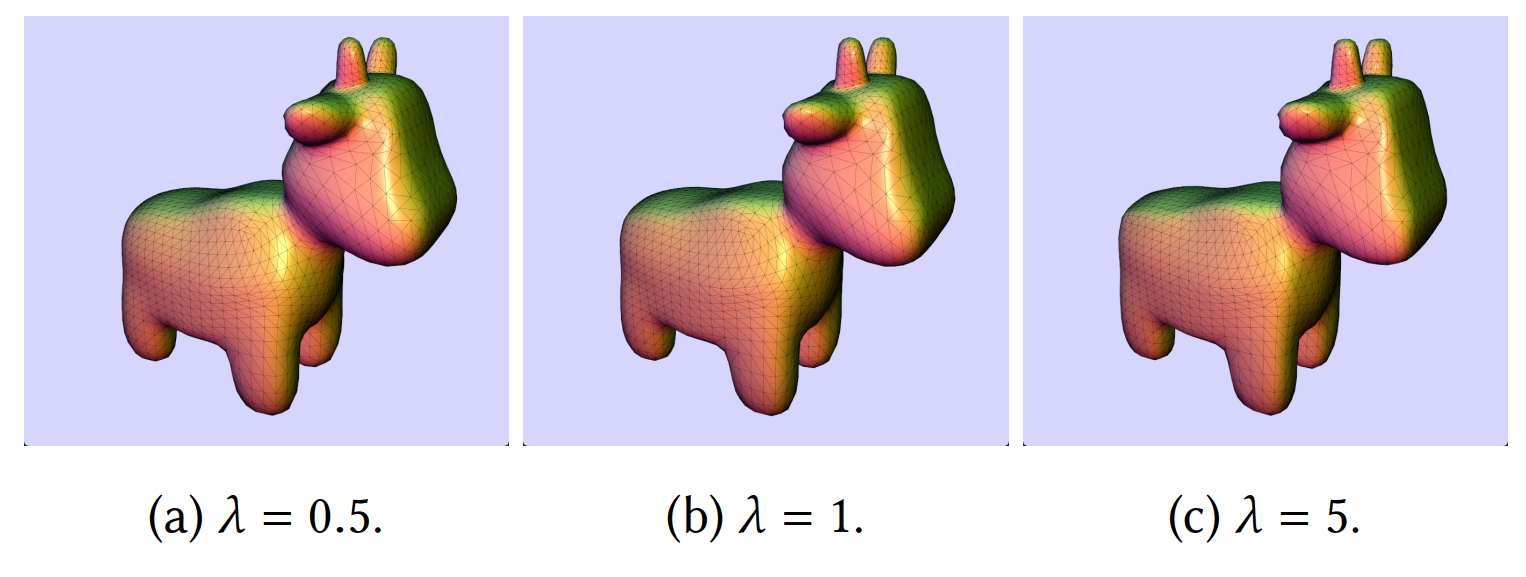
By changing
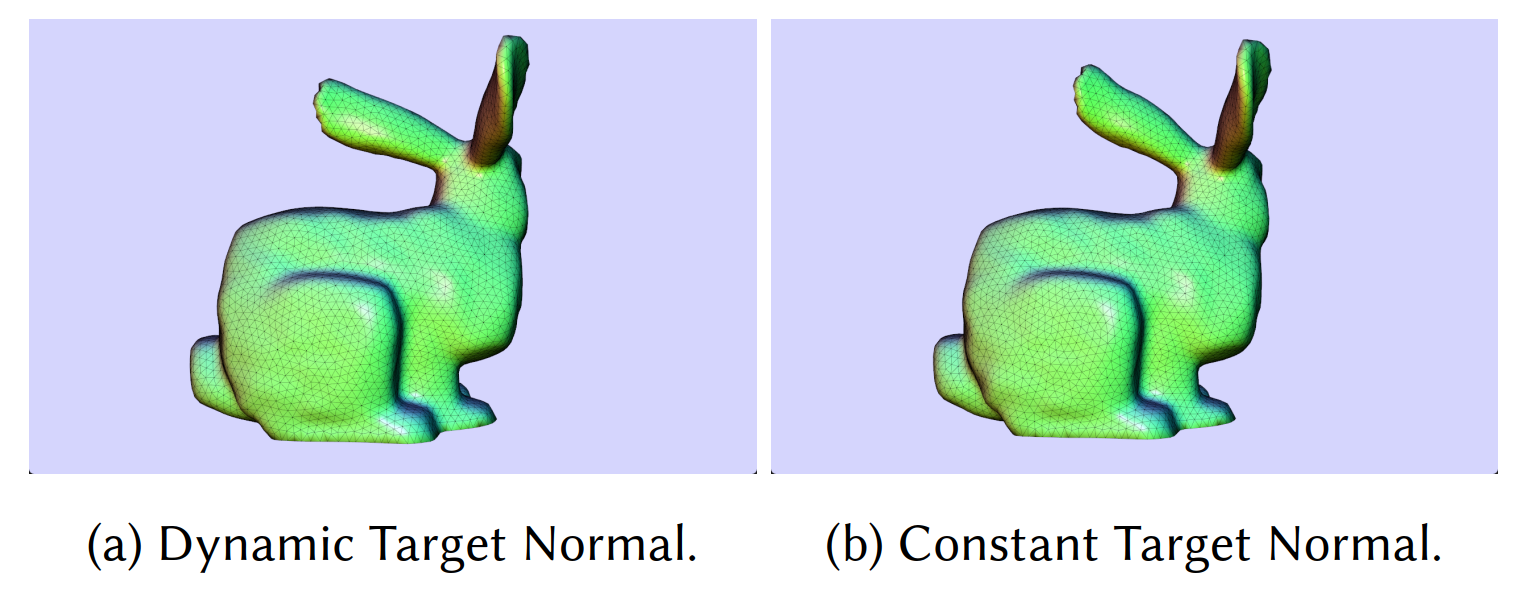
Setting the target normal
In terms of convergence, when
Limitations
While the proposed algorithm presents a direct and efficient approach to style transfer, it still grapples with several unresolved issues. For instance, it remains uncertain whether randomly provided target normals can be achieved through deformation, and if so, whether such alterations might result in surface inversion or other undesired behaviors.
Presently, the method struggles with high-genus style shapes, which entail topological changes. For instance, attempting to utilize curvature flow to morph such shapes into spheres proves unfeasible without addressing essential topological adjustments.
Additionally, the method overlooks area distortion concerns. The adoption of techniques like curvature flow or Gauss maps can induce significant area distortions.